一种新型空心、豌豆大小的机器人可以滚动、翻转和跳跃来导航周围环境。它可以轻松地从干燥的表面过渡到液态水池,使其成为完全两栖的。它能够在多种环境中以不同类型的运动方式(同时携带货物)脱颖而出,这使其有别于其他微型机器,后者大多只能以单一方式移动。这种新型机器人的多功能性也使其非常擅长穿越、跨越和绕过障碍物。有一天,它的小尺寸和多功能性可能使其能够在人体复杂的环境中导航,并将靶向药物有效载荷输送到有需要的患者体内。
该机器人克服物理障碍的能力源于独特的设计:折叠成称为克雷斯林图案的折纸结构,顶部装有磁铁。克雷斯林图案看起来像一系列堆叠的直角三角形环绕着机器人的腹部,使其看起来像一个有脊且略微扁平的圆柱体。这些脊也赋予它螺旋桨般的形状,有助于它在液体中移动。“我们真正想看到的是,我们是否可以将几何特征与折纸设计的可折叠性相结合,以实现[机器人]的有效导航,并利用其可折叠机制进行药物输送,”斯坦福大学机械工程助理教授赵芮妮(Renee Zhao)说。她和她的同事在周二发表于《自然-通讯》(Nature Communications)杂志上的一篇论文中描述了这款机器人。
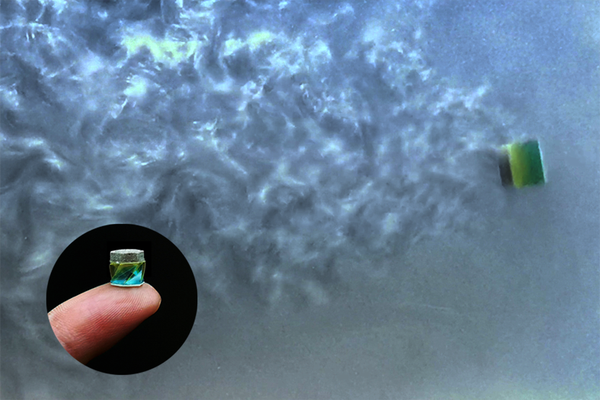
一个集成了旋转多模式运动、货物运输和靶向药物输送功能的折纸微型机器人在实验室障碍赛道中翻滚。图片来源:Renee Zhao,斯坦福大学机械工程系
关于支持科学新闻报道
如果您喜欢这篇文章,请考虑通过以下方式支持我们屡获殊荣的新闻报道: 订阅。通过购买订阅,您正在帮助确保有关塑造我们当今世界的发现和想法的具有影响力的故事的未来。
一端的小孔可以进入机器人的空心中心,中心可以容纳少量有效载荷:物体或一些液体。另一端的磁铁使机器能够进行无线控制——操作员只需要自己的磁铁。研究人员使用的磁场类型类似于磁共振成像(MRI)机器产生的磁场类型,赵解释说。“我认为一种策略是开发这种机器人,使其与 MRI 系统兼容,”她说,以便在患者处于成像机器中时对其进行控制。赵补充说,开发一种可以生成和操纵正确类型磁场的新型设备也是一种选择,但这需要像 MRI 机器一样结合医学成像来跟踪机器人在体内的位置。
新型机器人的某些版本在其柔软的圆柱形结构的另一侧装有第二块磁铁。这使得机器人可以泵送。控制磁场的操作员在磁铁之间产生少量旋转力,从而挤压机器人薄薄的塑料主体。重复此操作可以将液体从机器人的腹部泵送到周围环境。
折纸折叠作为液体药物受控输送的泵送机制。图片来源:Renee Zhao,斯坦福大学机械工程系
该设备的功能不止于输送液体有效载荷。它的螺旋桨状形状意味着操作员可以通过施加旋转磁场使其旋转,从而将其推进液体中。这种旋转还会产生足够的吸力,将物体吸入机器人的空心腹部。当它游泳时,旋转运动将吸入的有效载荷保持在内部。当机器人到达目的地时,操作员可以停止旋转,机器人就会倾倒出它拾取的任何东西。这允许将少量固体有效载荷输送到目标位置。
用于货物运输的旋转吸取机制。图片来源:Renee Zhao,斯坦福大学机械工程系
从理论上讲,这个过程可以将液体或固体药物直接输送到身体的特定位置——例如,可能在消化道中。赵说,该机器人的设计材料足够柔软,可以避免组织损伤。她指出,即使是磁铁也是柔软的。该团队通过将微小的玻璃珠和金属纳米颗粒嵌入柔软的塑料中制成磁铁。研究人员证明,该机器人可以在干燥的空猪胃以及充满液体的猪胃中 maneuver(操纵)。他们控制了机器人的总体轨迹,但没有必要告诉它如何绕过小的障碍物:磁场告诉它向某个方向移动,它就会滚动、翻滚或执行任何其他运动来采取该路径。如果机器人遇到较大的障碍物,操作员可以短暂地增加磁场强度,使机器人跳跃。如果它遇到一个深水池,操作员可以改变磁场,使设备游泳。
这种简单设计的机器人的多功能性让哈佛微型机器人实验室的博士后机器人工程师徐思毅(Siyi Xu)感到惊讶,她没有参与这项新研究。* “看到他们将这么多功能集成到一个[设计]中非常有趣,”她说。徐补充说,许多类似的小型机器人只专注于一种运动方式,无论是行走、爬行、游泳还是飞行。
赵说,这种新的、更灵巧的折纸设计可能成为未来微型机器人的蓝图。这可能会开启更多的应用。“这些功能不限于特定的疾病或特定的应用,”她说。她和她的实验室现在正在考虑如何使这些机器人更小,并能够在血液中穿行。稍大一点的机器人可以携带微型摄像头或镊子,这对于微创医疗程序将非常有用。赵计划继续探索类似的设备,在保持这些微型机器人设计简洁性的同时,增加更多的功能。
*编者注(2022 年 6 月 15 日):此句子在发布后经过编辑,以澄清徐思毅在哈佛微型机器人实验室的职位。