
众所周知,机器人的跳跃能力很差。有些机器人可以跳得很高,但不能在短时间内重复跳跃。反之亦然。加州大学伯克利分校的机器人专家和博士生邓肯·霍尔丹意识到这一缺陷的一个影响——许多现有的机器人无法在大型间隙和高障碍物中机动,例如在灾难现场进行救援工作。因此,霍尔丹转向动物王国,研究自然界最优秀的跳跃者,希望能选择一种作为更灵活、自主机器的模型。
霍尔丹首先创建了一个衡量标准,以评估动物可以跳多高和多快。他的进一步研究确定,自然界中最好的连续跳跃者是丛猴,或称婴猴,一种非洲本土的夜行性灵长类动物。丛猴的敏捷性指标是任何当代跳跃机器人的两倍。《科学机器人》杂志最近一期详细介绍了这些结果。
丛猴的腿和肌肉经过优化,可以蹲伏,这种姿势有助于它将势能储存在肌腱中。霍尔丹将这些物理原理转化为制造了一款名为 Salto 的机器人。它仅重 100 克(大约相当于一块肥皂的质量),垂直跳跃高度为一米。但更值得注意的是,它可以从地板跳到墙上的目标,并平均再反弹 1.21 米的高度。霍尔丹说,新的跳跃系统的力学原理可以应用于任何机器人。这意味着,我们的机械朋友在不久的将来就能跳过高楼大厦,至少可以连续跳跃。
关于支持科学新闻
如果您喜欢这篇文章,请考虑通过以下方式支持我们屡获殊荣的新闻报道: 订阅。通过购买订阅,您将帮助确保有关当今塑造我们世界的发现和想法的具有影响力的故事的未来。
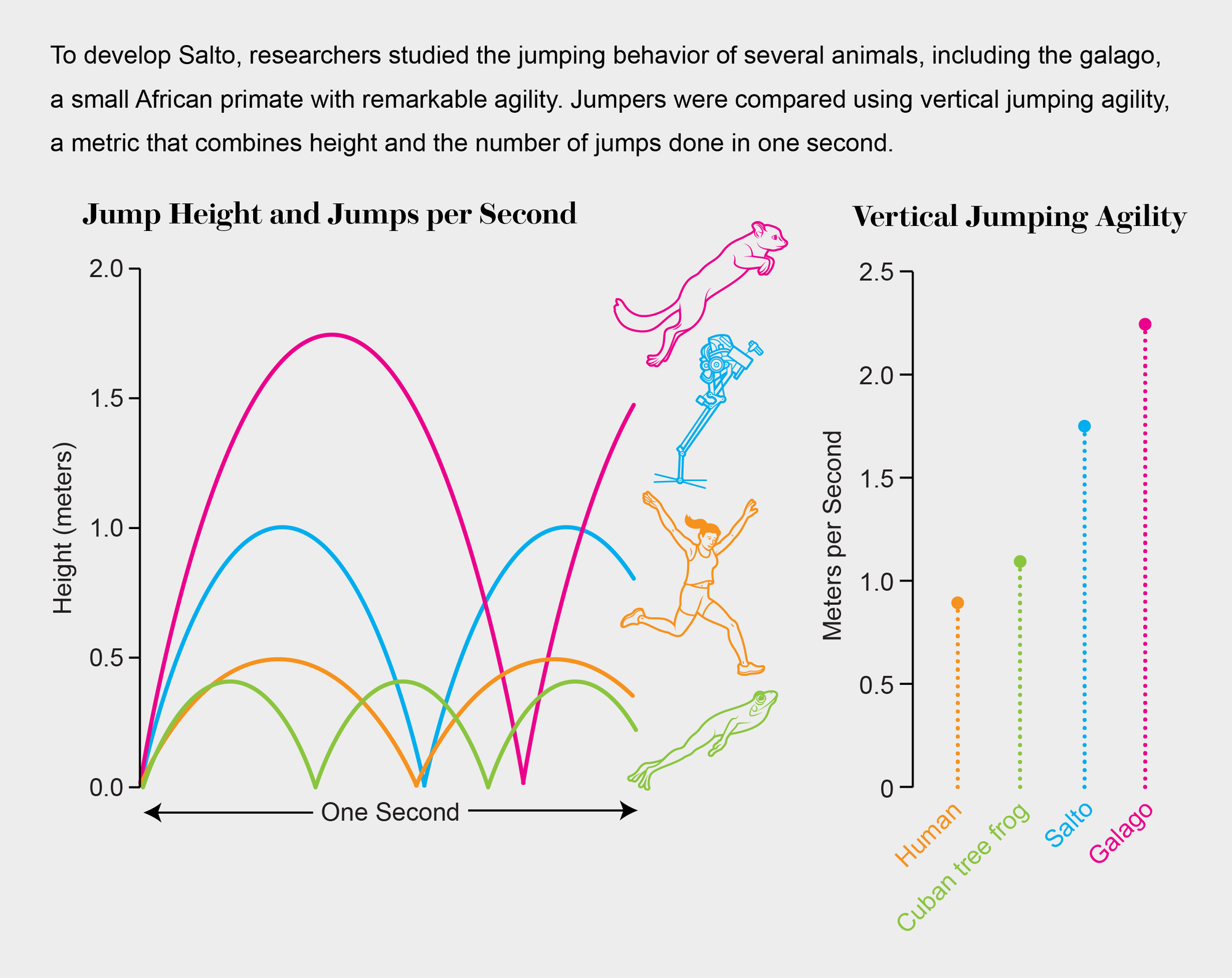
来源:Brown Bird Design(图);Amanda Montañez(图表);来源:“通过串联弹性功率调制实现的机器人垂直跳跃敏捷性”,作者:Duncan W. Haldane 等人,《科学机器人》,第 1 卷,第 1 期,文章编号 EAAG2048;2016 年 12 月 6 日。