现在,一种双足机器人可以迈出最好的一步,以脚跟到脚趾的运动方式行走,这种方式比扁平足机器人更接近人类的运动方式。
佐治亚理工学院机器人技术博士后研究员、帮助 DURUS 找到立足点的研究人员之一 Christian Hubicki 表示,DURUS 机器人通过脚跟向前滚动“脚”,并在脚趾处蹬离地面,从而紧密模仿人类的行走动作,使其更节能,更擅长在不平坦的地形上导航。
Hubicki 告诉 Live Science:“增强的行走能力可以帮助机器人在人类活动的环境中导航,并可以提高为灾难响应而创建的机器人的性能。[奔跑中的机器人!5 个真正能动的机器人]
关于支持科学新闻
如果您喜欢这篇文章,请考虑通过以下方式支持我们屡获殊荣的新闻报道 订阅。通过购买订阅,您正在帮助确保未来能够继续讲述关于塑造我们当今世界的发现和思想的具有影响力的故事。
人形机器人 DURUS 由研究性非营利组织 SRI International 和佐治亚理工学院的高级机械双足实验机器人 (AMBER) 实验室合作设计。早期 DURUS 设计经过修改,以适应新的行走方式,这得益于一种新颖的数学算法,该算法可以逐步调整机器人的动量和平衡。
装备精良
Hubicki 告诉 Live Science,双足行走的机器人通常具有“脚”,这些“脚”又大又平,以提供更稳定的平台。
Hubicki 说:“更大的脚意味着更大的支撑多边形,并且更难摔倒。”
控制机器人前进动量的算法通常在蹬离时保持这些大脚平放在地面上,以最大限度地降低机器人倾倒的风险。
Hubicki 说:“一旦你倾斜到边缘,你就好像一个钟摆——在一个可以向前或向后倒的枢轴点上。”
但是,虽然扁平足步行者可能在跑步机上表现良好,但现实世界中无法容纳扁平足的不平坦地形可能会使算法感到困惑,并阻止机器人前进。
AMBER 实验室的研究人员介入了,他们设计了一种新的算法,即使只有部分脚部接触地面,也能使机器人保持直立并向前移动。Hubicki 和他的同事使用带有足弓的改良脚测试了 DURUS;根据 Hubicki 的说法,每一步都从脚跟接触地面开始——“脚跟撞击”,然后滚动到脚掌以蹬离地面。安装在机器人脚踝处的弹簧就像肌腱一样,储存脚跟撞击的能量,以便稍后释放,作为提升力。
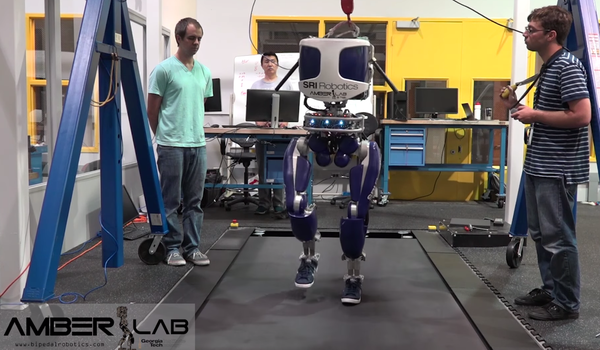
7 月 12 日,AMBER 实验室在 YouTube 上发布了一段 DURUS 自信迈步的视频。DURUS 的新脚与人脚大小相近——大约是原始型号脚长度的一半。为了强调这种相似性,该团队给它们穿上了一双运动鞋。
Hubicki 说:“我们想表明,我们的算法可以让它用人类大小的脚行走。还有什么比给它穿上鞋子更好的方法呢?”
Hubicki 补充说,该算法甚至可能在机器人技术之外有应用,他建议该算法可用于改进假肢和外骨骼的设计,以帮助需要辅助工具的人四处走动。
版权所有 2016 年 LiveScience,Purch 公司。保留所有权利。未经许可,不得发布、广播、改写或重新分发此材料。