2020年,生物学家迈克尔·莱文和他的同事报告说,他们通过将细胞簇塑造成微小的人工形态,制造出了“生物机器人”,这些机器人可以在表面“行走”。莱文的团队认为,这些实体,他们称之为异种机器人,因为它们是由非洲爪蟾非洲爪蟾的皮肤和心肌细胞制成的,可以被认为是一种新型生物。当研究人员在一年后表明,异种机器人可以从青蛙的皮肤细胞中自发组装并表现出多种行为(在液体中游动时)时,这一说法可能变得更具说服力。
一些研究人员认为,这种行为在两栖动物的细胞中并不那么令人惊讶,因为两栖动物以其在受损时再生身体部位的能力而闻名。但现在,莱文和他在塔夫茨大学的同事在先进科学杂志上报告说,他们用人体细胞制造了类似的“类机器人”实体。他们称之为生物机器人。
支持科学新闻报道
如果您喜欢这篇文章,请考虑通过以下方式支持我们屡获殊荣的新闻报道 订阅。通过购买订阅,您正在帮助确保有关塑造我们当今世界的发现和想法的具有影响力的故事的未来。
使生物机器人移动的关键是,与异种机器人一样,它们的表面覆盖着称为纤毛的毛发状蛋白质附属物,这些纤毛来回摆动并推动结构体在流体中移动。为了真正到达任何地方,纤毛都必须以协调一致的方式一起跳动。
生物机器人不仅可以游泳,而且似乎还具有独特的形状和行为模式——就像同一物种生物中的菌株或群体。塔夫茨大学的团队报告说,生物机器人似乎能够在其他人体细胞层中诱导一种基本的伤口愈合形式,从而提高了在医学中应用它们的可能性。
一些科学家声称,这些人体细胞团块(如最初的异种机器人)的重要性被夸大了;他们质疑这些自发形成的实体是否真的可以被视为一种“机器人”。有些人认为,青蛙细胞可以形成可以移动的小团块,这没有什么特别新颖或令人惊讶的。“总的来说,非洲爪蟾胚胎界了解这些细胞的人真的看不出有什么大惊小怪的,”爱丁堡大学的发育生物学家杰米·戴维斯说,他没有参与莱文2020年的研究或他最近的研究。他同样对人体细胞簇(如这些细胞簇)会移动感到不惊讶。
但莱文认为,这里的关键是视角的转变。与其将细胞簇视为可用于研究人类生物学的小组织块,不如将它们视为具有自身特征的类生物实体,具有特定的形状和行为,可以作为医疗和其他应用的“生物机器人平台”使用——例如,通过系统地修改这些特征以获得一些有用的行为,例如修复体内受损组织。
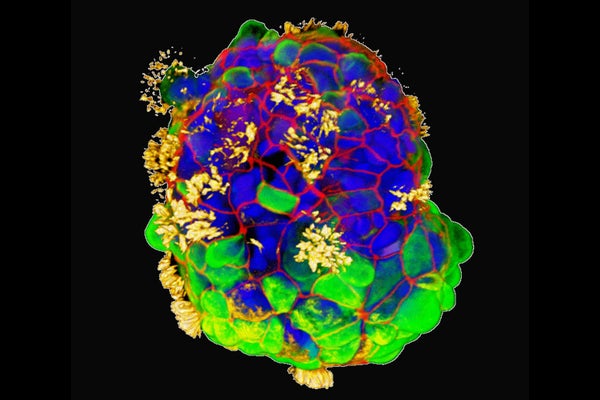
生物机器人生长成独特的形状,并且表面纤毛分布,使其能够以不同的模式移动。运动模式可以用于不同的目的,例如移动到伤口或悬停在伤口上方。图片来源:Gizem Gumuskaya 等人,“运动型活体生物机器人由成人人体体细胞祖细胞自我构建”,先进科学,2023年11月30日
莱文说,更根本的是,生物机器人通过展示人体细胞不仅可以自发构建人体组织和器官,还可以构建自然界从未产生过的完全不同的结构,从而让人瞥见人体细胞可用的“形态空间”。“我们正在探索形态空间的各个方面,”他说。“进化为您提供了少量变异,但实际上还有更多。”细胞和组织发展不同类型结构的能力称为可塑性。
生物机器人的直径在 30 到 500 微米之间,能够存活长达两个月,它们由取自成人人体肺组织的细胞制成。这种组织天然地在其表面具有纤毛,纤毛来回摆动以输送粘液,粘液可以吸收并清除吸入空气中的碎屑。(相比之下,青蛙皮肤上的纤毛移动粘液以保持皮肤湿润。)
人们早已知道,这种类型的组织可以聚集成纤毛团块。从 2010 年代初期开始,一些论文报告说,这种聚集体(通常称为类器官)可用于研究肺功能。在其中一些类器官中,纤毛指向中空的内部空间,就像人体气道的支气管一样。但在过去几年中,研究人员还发现大致呈球形气道细胞簇(球状体)生长时纤毛从其表面向外突出,就像生物机器人一样。
由于之前的工作关注的是将类器官作为人体呼吸系统的模型,因此它没有包括对细胞结构行为的任何研究。总的来说,这些研究将气道球状体嵌入并固定在富含蛋白质的凝胶(称为基质胶)中。“我们的主要目标是开发一种气道类器官系统,用于识别治疗囊性纤维化(一种先天性肺病)的潜在药物疗法,”加州大学旧金山分校的病理学家沃尔特·芬克拜纳说,他是早期研究的作者之一。
相比之下,莱文的团队希望将球状体解放出来。“棘手的步骤是轻轻溶解基质胶,以便去除凝胶中的蛋白质,但不要去除将机器人固定在一起的蛋白质,”新论文的第一作者塔夫茨大学的吉泽姆·古穆斯卡亚说。她说,之前制造气道球状体的三种方法中的两种是通过在小孔中塑造它们而不是像她的团队那样允许它们自组装来塑造细胞簇的,从而探索细胞固有的可塑性。她补充说,后一种方法使球状体的制造速度更快、效率更高。

生物机器人可以自发融合在一起形成更大的结构,称为超级机器人,它已证明具有促进神经元生长的能力。图片来源:Gizem Gumuskaya 等人,“运动型活体生物机器人由成人人体体细胞祖细胞自我构建”,先进科学,2023年11月30日
塔夫茨大学团队面临的首要挑战将是说服其他人相信生物机器人是独立的实体,具有细胞集体“寻求”的形状和行为,而不仅仅是看起来表面上像微生物的有点随机的人体组织碎片。
戴维斯曾与莱文共同撰写了一篇关于合成形态学的评论文章,他认为最初的异种机器人工作引起了一些兴趣。但他对人体细胞簇可以用纤毛“游泳”感到不以为然。他说,一旦球状体从凝胶基质中释放出来,如果你有跳动的纤毛,那几乎是不可避免的。他说,这仅仅是牛顿力学,纯粹是一种偶然的功能,并补充说,“我看不出这些带有摆动纤毛的细胞团块如何能称得上‘机器人’。”
生物技术公司 STEMCELL Technologies 的 Salvatore Simmini 和 Jenna Moccia 也培养了人体气道类器官,他们认为这些类器官的行为说明了构成它们的细胞的生物学功能。Simmini 和 Moccia 说,如果在纤毛向外方向的类器官中保持将粘液扫出气道的纤毛的协调运动,那么纤毛将充当微小的桨,推动细胞簇在液体中移动。
然而,莱文和他的同事们认为,这些运动不仅仅是随机的。在统计分析了数百个生物机器人的运动后,他们说,这些机器人似乎可以分为不同的类别。在一组中,结构体——小的且或多或少呈球形——表面布满纤毛,并且往往根本不移动。另一组具有更不规则的——有点像土豆形状——结构体,这些结构体仅部分被纤毛覆盖。它们的区别在于纤毛紧密地聚集在一个区域,导致它们以圆形路径游泳,或者纤毛更松散地分散,使其直线运动。
研究人员说,这些形态和行为类型中的每一种都可以被认为是细胞群体的固有目标结构——有点像人体不同的组织类型或器官。
“以前从未展示过的是这些东西对其他细胞的影响,”莱文补充道。当研究人员将生物机器人在培养皿中生长的平面人体神经元层上漫游,而该神经元层已被划痕损坏时,他们发现机器人将帮助神经元在间隙中重新生长。这不仅仅是因为生物机器人提供了两个边缘之间的被动桥梁,因为小块惰性多糖凝胶没有相同的效果。
“我们不知道这种机制,这也是我们试图弄清楚的事情之一,”古穆斯卡亚说。“但我们知道这不仅仅是机械作用。”莱文怀疑生物机器人正在向划痕边缘的神经元发送信号——可能是生化信号——以鼓励它们生长到间隙中。
“找到这种能力是我们首先研究的事情之一,”莱文说。“这告诉我,可能还有许多其他可能性,而这仅仅是冰山一角。这开启了使用这些构建体以多种其他方式影响其他细胞[在活生物体或实验室培养皿中]的可能性。”古穆斯卡亚希望在人类神经退行性疾病模型(例如模拟大脑的神经元类器官)中寻找类似的“治疗”行为;莱文建议生物机器人可能用于帮助修复受损的视网膜或脊髓。但这些想法目前仍完全是推测性的。