一款新型变形龟形机器人可以探索陆地与海洋交汇处的危险区域,并可能引领未来的机器在复杂的现实世界条件下航行。
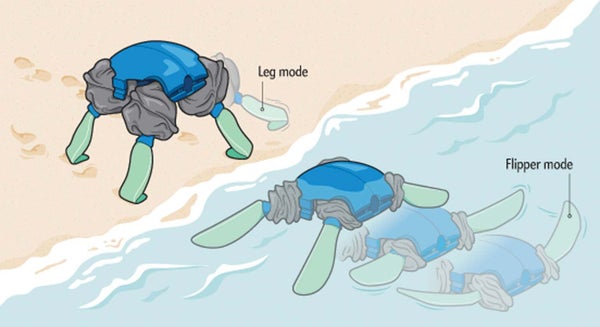
两栖机器人龟 (ART) 结合了海洋游泳海龟和陆地行走陆龟的最佳移动性特征,最近在《自然》杂志上描述了该机器人,它可以将其肢体从类似海龟的鳍状肢变形为类似陆龟的腿。“大多数两栖机器人……在每种环境中使用专用的推进系统,”耶鲁大学机器人专家丽贝卡·克莱默-博蒂格里奥说,她是该论文的资深作者。“我们的系统为两种环境调整了单一的统一推进机制:它有四个肢体,这些肢体可以在水生运动的鳍状肢状态和陆地运动的腿状肢状态之间转换。”
每个变形肢体都由复合聚合物材料包围,这种材料在加热时是可塑的,冷却时是坚硬的。为了改变肢体的形状,内置的铜加热器会加热并软化外层材料。然后,下面的软体机器人“肌肉”会膨胀或收缩,将扁平的鳍状肢转变为圆形的腿状肢,反之亦然。最后,聚合物冷却并在新的形状周围硬化,这个过程需要一到两分钟。软体机器人肢体连接到更传统的“硬”机器人肩关节,肩关节包含三个电子马达,因此 ART 可以在陆地上“爬行”或“蠕动”,也可以在水中“划桨”或“拍打”。这些关节连接到模块化底盘,密封的 PVC 管保护机器人的电子元件免受水的侵害。3D 打印的“外壳”为机器人提供了流线型形状和一个可以容纳空气或压载物以调节浮力的空间。
支持科学新闻报道
如果您喜欢这篇文章,请考虑通过以下方式支持我们屡获殊荣的新闻报道 订阅。通过购买订阅,您正在帮助确保有关塑造我们当今世界的发现和想法的具有影响力的故事的未来。
奥斯陆都市大学的机器人专家 Tønnes Nygaard 说,集成软体机器人和传统机器人技术赋予了 ART 变形能力,他没有参与这项新研究。“当您使用传统的机器人技术时,非常严格、刚性的运动模式是必要的,”他补充道。“但现在借助来自软体机器人的这些技术,您或许能够做一些更流畅的事情。”
这种自适应技术最终可能帮助机器人在现实世界中发现的许多不同表面和环境中跋涉,而无需携带额外的推进系统,这可能会降低它们的移动效率。克莱默-博蒂格里奥的团队发现,ART 使用的能量与仅为一种环境制造的机器人大致相同。
这款机器人陆龟尚未到达终点线:目前的原型仍然需要系绳来提供电力和通信,并且它的动作缓慢而笨拙。但研究人员正在努力改进这些问题。“我很高兴看到他们已经取得了多大的进步,”Nygaard 说。“我非常有兴趣看到这个团队在几年内会取得什么成果。”