每次看到这一幕我都起鸡皮疙瘩。一位瘫痪的志愿者坐在轮椅上,仅凭思想就能控制电脑或机械肢体——这是脑机接口 (BMI) 实际应用的演示。
这发生在我2013年的实验室里,当时埃里克·索托(Erik Sorto)在21岁时因枪伤而瘫痪,十多年来第一次仅凭思想就无需帮助地喝到啤酒。脑机接口从高级皮层区域发送神经信息。然后,一个机电附件能够伸出手抓住瓶子,将其举到索托的嘴唇边,然后他喝了一口。在他接受脑部电极植入手术一年后,他喝到了这口啤酒,该手术旨在控制支配触发运动的想法的信号。我和我的实验室同事惊奇地看着他完成了这项看似简单,但实际上却非常复杂的任务。
目睹如此壮举立即引发了一个问题:仅仅是思想如何控制机械假肢?我们每天不假思索地移动四肢——轻松完成这些动作是任何先进脑机接口的目标。然而,神经科学家们几十年来一直试图解码启动伸出手去抓取物体的运动的神经信号。读取这些信号的有限成功促使人们寻找新的方法来利用大脑 860 亿个神经元交流时产生的嘈杂电活动。新一代脑机接口现在有望通过非常精确地利用制定动作的神经区域(无论是想要抓住杯子还是迈出一步)来在大脑和假肢之间建立无缝连接。
支持科学新闻事业
如果您喜欢这篇文章,请考虑通过以下方式支持我们屡获殊荣的新闻事业: 订阅。通过购买订阅,您将帮助确保未来继续讲述关于发现和塑造当今世界的想法的具有影响力的故事。
从大脑到机器人
脑机接口通过向大脑发送和接收——“写入”和“读取”——消息来运作。接口技术主要分为两大类。“写入式”脑机接口通常使用电刺激将信号传输到神经组织。这项技术的成功临床应用已投入使用。耳蜗假体刺激听觉神经,使失聪受试者能够听到声音。控制运动活动的区域——基底神经节的深部脑刺激,可治疗帕金森病和特发性震颤等运动障碍。刺激视网膜的设备目前正在临床试验中,以减轻某些形式的失明。
相比之下,“读出式”脑机接口记录神经活动,仍处于发展阶段。在下一代技术应用于患者之前,需要解决读取神经信号的独特挑战。粗略的读出技术已经存在。脑电图 (EEG) 记录厘米级脑组织上的平均活动,捕获数百万神经元的活动,而不是单个回路中单个神经元的活动。功能性磁共振成像 (fMRI) 是一种间接测量方法,记录流向活跃区域的血流量增加。它可以比脑电图成像更小的区域,但其分辨率仍然相当低。血流量变化缓慢,因此功能性磁共振成像无法区分大脑活动的快速变化。
为了克服这些限制,理想情况下,人们希望记录单个神经元的活动。观察大量单个神经元的放电率变化可以最完整地了解特定大脑区域正在发生的事情。近年来,植入大脑的微小电极阵列已开始使这种类型的记录成为可能。目前使用的阵列是四乘四毫米的平面,带有 100 个电极。每个电极长一到 1.5 毫米,从平面突出。整个阵列类似于钉床,可以记录 100 到 200 个神经元的活动。
这些电极记录的信号会传递到“解码器”,解码器使用数学算法将单个神经元放电的各种模式转换为启动特定运动的信号,例如控制机械肢体或计算机。这些读出式脑机接口将帮助因脊髓损伤、中风、多发性硬化症、肌萎缩侧索硬化症和杜氏肌营养不良症而遭受脑损伤的患者。
我们的实验室专注于四肢瘫痪患者,他们因上脊髓损伤而无法移动上肢或下肢。我们从大脑皮层记录,大脑皮层是大脑两个大半球约三毫米厚的表面。如果展开,每个半球的皮层将测量约 80,000 平方毫米。随着收集到更多数据,专门控制特定大脑功能的皮层区域的数量不断增加,现在估计已超过 180 个区域。这些位置处理感觉信息,与其他参与认知的脑区进行交流,做出决定或发送命令以触发动作。
简而言之,脑机接口可以与皮层的许多区域互动。其中包括初级皮层区域,它们检测感觉输入,例如照射到视网膜上的光线的角度和强度或外周神经末梢触发的感觉。目标还包括初级区域之间密集连接的联合皮层,这些初级区域专门用于语言、物体识别、情感和决策的执行控制。
少数几个研究小组已经开始记录瘫痪患者的单个神经元群体,使他们能够在受控的实验室环境中操作假肢。在患者能够像心脏起搏器一样容易地配备神经假体装置之前,仍然存在重大障碍。我的团队正在追求从联合区域而不是其他实验室针对的运动皮层进行记录。我们希望这样做可以在感知传达意图的神经信号的放电方面提供更高的速度和通用性。
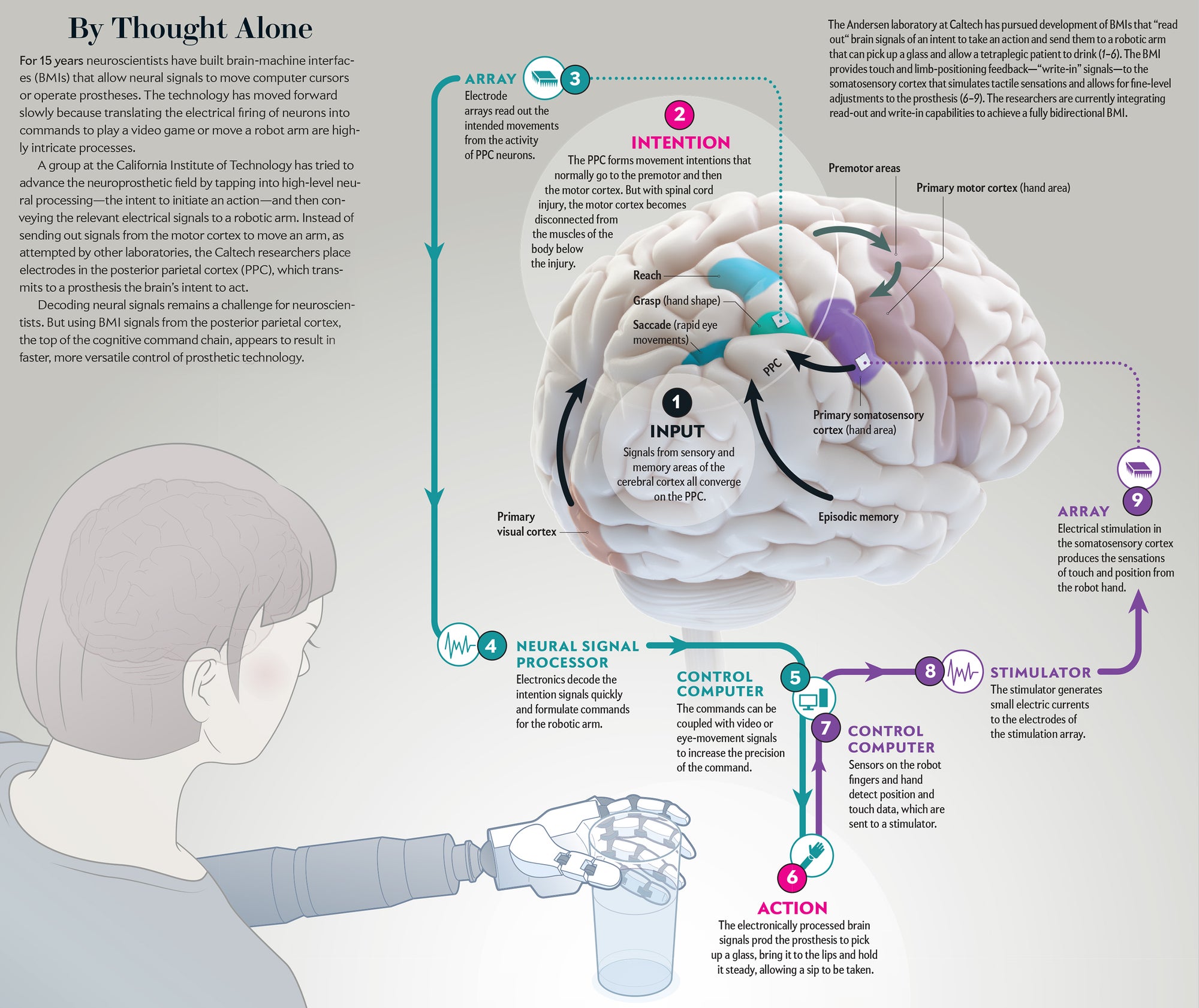
我的实验室研究的具体联合区域是后顶叶皮层 (PPC),它是启动运动计划的起始区域。在我们对非人灵长类动物的研究中,我们发现 PPC 的一个子区域,称为外侧顶内皮层,可以辨别开始眼球运动的意图。肢体运动处理发生在 PPC 的其他区域。顶叶到达区准备手臂运动。此外,当时在日本大学医学院的坂田秀夫 (Hideo Sakata) 及其同事发现,前顶内区制定抓握运动。
来自非人灵长类动物的记录表明,PPC 为大脑控制机器人或计算机光标提供了几个可能的优势。它控制双臂,而每个半球的运动皮层(其他实验室针对的区域)主要激活身体对侧的肢体。PPC 还指示运动的目标。例如,当非人灵长类动物在视觉提示下伸手去拿物体时,这个大脑区域会立即启动,标记所需物体的位置。相比之下,运动皮层会发送信号,指示伸展运动应采取的路径。了解预期运动动作的目标可以让脑机接口在几百毫秒内快速解码,而从运动皮层中找出轨迹信号可能需要一秒以上。

由加州理工学院的 Richard Andersen(左)及其团队开发的接口技术使埃里克·索托(Erik Sorto)(右)能够移动机械臂。图片来源:Lance Hayashida 和加州理工学院
从实验室到患者
从实验室动物实验到人类 PPC 研究并非易事。在我们进行首次人体植入之前,已经过去了十五年。首先,我们将计划用于人体的相同电极阵列插入健康的非人灵长类动物体内。然后,猴子学会了控制计算机光标或机械肢体。
我们组建了一支由来自加州理工学院、南加州大学、加州大学洛杉矶分校、兰乔洛斯阿米戈斯国家康复中心以及卡萨科利纳医院和医疗中心的科学家、临床医生和康复专业人员组成的团队。该团队获得了食品和药物管理局以及机构审查委员会的批准,这些机构负责评估相关实验室、医院和康复诊所中程序的安全性和伦理道德。
这种项目中的志愿者是真正的先驱,因为他们可能受益,也可能不会受益。参与者最终加入是为了帮助那些一旦技术完善并用于日常使用就会寻求该技术的用户。我们第一位志愿者索托的植入手术于 2013 年 4 月进行,由神经外科医生查尔斯·刘 (Charles Liu) 和布莱恩·李 (Brian Lee) 实施。手术进行得天衣无缝,但随后是等待愈合才能测试设备。
我在 NASA 喷气推进实验室的同事们曾建造并发射了火星探测器,他们谈到探测器进入行星大气层到着陆之前的七分钟恐怖时刻。对我来说,这是两周的忐忑不安,想知道植入物是否会起作用。我们知道非人灵长类动物大脑的相似区域是如何运作的,但人体植入是在测试未知的领域。以前没有人尝试过从人类 PPC 神经元群体中记录数据。
在测试的第一天,我们检测到了神经活动,到本周末,有足够神经元的信号开始确定索托是否可以控制机械肢体。当索托想象旋转他的手时,一些神经元的活动发生了变化。他的第一个任务包括将机械手转向不同的方向,与一名研究生握手。他和我们一样激动,因为这项成就标志着他受伤后第一次可以使用机械臂的身体运动与世界互动。
人们经常问学习使用脑机接口需要多长时间。事实上,这项技术开箱即用。使用大脑的意图信号来控制机械臂是直观且容易的。通过想象不同的动作,索托可以观看来自他皮层的单个神经元的记录,并随意打开和关闭它们。
我们在研究开始时询问参与者,他们希望通过控制机器人实现什么目标。对于索托来说,他希望能够自己喝啤酒,而不是寻求别人的帮助。他在研究开始大约一年后就掌握了这项技能。在加州理工学院研究科学家斯宾塞·凯利斯 (Spencer Kellis) 共同领导的团队(其中包括来自约翰·霍普金斯大学应用物理实验室的机器人专家)的合作下,我们将索托的意图信号与机器视觉和智能机器人技术提供的处理能力相结合。
视觉算法分析来自摄像机的输入,智能机器人将意图信号与计算机算法相结合,以启动机械臂的运动。经过一年的时间,索托实现了这一目标,现场每个人都欢呼雀跃。2015 年,我们在《科学》杂志上发表了我们关于使用来自 PPC 的意图信号来控制神经假体的首批成果。
索托不是我们技术的唯一用户。南希·史密斯 (Nancy Smith) 现在是该研究的第四年参与者,大约 10 年前因车祸导致四肢瘫痪。她曾是一名高中计算机图形学教师,并以弹钢琴为消遣。在我们与加州理工学院的泰森·阿夫拉洛 (Tyson Aflalo) 和加州大学洛杉矶分校的纳德·普拉蒂安 (Nader Pouratian) 等主要团队成员的研究中,我们发现史密斯的 PPC 中详细地表示了双手各个手指。通过使用虚拟现实,她可以在计算机屏幕上显示的左右“虚拟化身”手上分别想象和移动 10 个手指。通过使用一只手五个手指的想象运动,史密斯可以在计算机生成的钢琴键盘上演奏简单的旋律。
图片来源:AXS 生物医学动画工作室
大脑如何表示目标
我们很高兴与这些患者合作,找到调整为处理与个人意图相关的信号的神经元。从仅仅几百个神经元中收集到的信息量之大令人震惊。我们可以解码一系列认知活动,包括心理策略(想象的运动与尝试的运动)、手指运动、关于回忆视觉刺激的决策、抓握的手势、观察到的动作、诸如“抓握”或“推动”之类的动作动词以及视觉和体感知觉。令我们惊讶的是,插入几个微小的电极阵列使我们能够解码一个人打算做的很多事情,以及导致意图形成的感觉输入。
从一小块脑组织中可以记录多少信息这个问题让我想起了我职业生涯早期遇到的一个类似的科学问题。在我在约翰·霍普金斯大学医学院已故的弗农·芒特卡斯尔 (Vernon Mountcastle) 的指导下进行博士后培训期间,我们研究了猴子的 PPC 中如何表示视觉空间。我们的眼睛就像照相机,感光视网膜会发出成像在其上的视觉刺激的位置信号——整个图像被称为视网膜地形图。神经元对视网膜的有限区域做出反应,这些区域被称为它们的感受野。在其他方面,处理视觉感知与摄像机记录不同。当摄像机移动时,记录的图像也会移动,但是当我们移动眼睛时,世界看起来是稳定的。来自眼睛的视网膜地形图像必须转换为视觉空间表示,该表示考虑到眼睛正在看的位置,以便当眼睛移动时,世界不会显得像在滑动。
PPC 是高阶视觉空间表示的关键处理中心。为了让人伸手抓住物体,大脑需要考虑到眼睛正在看的位置才能将其拾起。人类的 PPC 病变会导致不准确的伸手动作。在芒特卡斯尔的实验室里,我们发现单个 PPC 神经元具有感受野,可以记录场景的一部分。相同的细胞也携带眼位信息。这两个信号通过将视觉反应乘以眼睛在头部的位置相互作用——其乘积称为增益场。
当我在加州大学圣地亚哥分校街对面的索尔克生物研究所获得我的第一个教职时,我继续研究理解大脑空间表示的问题。与开发神经网络的加州大学圣地亚哥分校理论神经科学家大卫·齐普瑟 (David Zipser) 合作,我们在《自然》杂志上报道了一个神经网络的计算模型,该模型将视网膜地形位置与注视方向相结合,以制作对眼球运动不变的空间图。在神经网络的训练过程中,它们中间层形成了增益场,正如 PPC 实验中的情况一样。通过在同一神经元内混合视觉输入和眼位信号,只需九个神经元就可以表示整个视野。
最近,混合表示(对多个变量做出反应的神经元群体,如增益场)的想法再次引起关注。例如,来自前额叶皮层的记录显示,两种类型的记忆任务和不同的视觉对象混合在一起。
此外,这项工作可能与解释 PPC 中正在发生的事情有直接关系。当我们要求史密斯使用一套书面说明执行一项任务的八种不同组合时,我们发现了这一点。她的其中一项任务需要制定策略来想象或尝试一个动作。另一项任务需要使用身体的右侧和左侧;第三项任务需要挤压手或耸肩。我们发现 PPC 神经元混合了所有这些变量——并且这种混合表现出特定的模式,这与我们和其他人在实验室动物实验中报告的随机相互作用不同。
用于制定策略和控制身体每一侧的神经元群体的活动趋于重叠。如果一个神经元放电以启动左手的运动,它很可能也会对尝试的右手运动做出反应,而控制肩部和手的神经元组则更加分离。我们将这种类型的表示称为部分混合选择性。此后,我们发现部分混合表示中存在相似之处,这些相似之处似乎构成了运动的语义。针对相同动作类型的细胞活动趋于重叠。当一个人阅读“grasp”这个词时,对一个人抓取物体的视频做出反应的神经元也很可能会变得活跃。但是,对诸如推动之类的动作做出反应的细胞倾向于被分离成它们自己的组。总的来说,部分混合编码似乎是相似计算的基础(左手的运动类似于右手的运动)。它还将表现出不同形式神经处理的那些(肩部的运动与手的运动不同)分开。
在联合皮层的某些部分发现了混合和部分混合编码——新的研究必须探索它们是否出现在控制语言、物体识别和执行控制的其他位置。此外,我们想知道初级感觉或运动皮层区域是否使用类似的部分混合结构。
目前的研究表明,至少在体感皮层中,神经元不对视觉刺激或做出运动的意图做出反应,但确实对体感刺激和运动的想象执行做出反应。因此,有直接证据表明,在人类 PPC 中看到的变量在初级体感皮层中没有发现,尽管部分混合选择性可能在两个区域都存在,但变量集不同。
另一个近期目标是找出学习新任务能在多大程度上影响使用假肢的志愿者的表现。如果学习很容易发生,那么大脑的任何区域都可能被植入并接受任何可想象的脑机接口任务的训练。例如,植入初级视觉皮层的植入物可以学习控制运动任务。但是,如果学习受到更多限制,则需要在运动区域植入植入物才能执行运动任务。早期结果表明后一种可能性,并且植入物可能必须放置在先前已被确定为控制特定神经功能的区域。
写入感觉
脑机接口不仅必须接收和处理大脑信号,还必须将来自假肢的反馈发送到大脑。当我们伸手去拿物体时,视觉反馈有助于引导手指向目标。手的定位取决于要抓取的物体的形状。如果手在开始操作物体后没有收到触摸和肢体定位信号,性能会迅速下降。
找到纠正这种缺陷的方法对于我们脊髓损伤的志愿者至关重要,他们无法移动受伤部位以下的身体。他们也无法感知对其流畅运动至关重要的触觉或身体定位。那么,理想的神经假体必须通过双向信号传递来补偿:它必须传输志愿者的意图,但也必须检测来自机械肢体传感器的触摸和定位信息。
匹兹堡大学的罗伯特·高恩特 (Robert Gaunt) 和他的同事通过在四肢瘫痪患者的体感皮层(肢体输入处理触摸感觉的地方)中植入微电极阵列来解决这个问题。高恩特的实验室通过微电极发送微小电流,受试者报告了来自手表面部分的感觉。
我们还在体感皮层的手臂区域使用了类似的植入物。令我们惊喜的是,我们的受试者 FG 报告了自然的感觉,例如皮肤上的挤压、敲击和振动,这被称为皮肤感觉。他还感知到肢体正在移动的感觉——一种称为本体感觉的感觉。这些实验表明,肢体感觉丧失的受试者可以通过具有写入式感知的脑机接口重新获得感觉。下一步是提供丰富的体感反馈感觉,以提高大脑控制下机器人的手动灵活性。为了实现这一目标,匹兹堡小组最近表明,与仅标准的视觉反馈相比,刺激初级体感皮层可以缩短用机械臂抓住物体的时间。此外,我们想知道受试者是否能检测到“具身化”的感觉,即机械肢体似乎成为他们身体的一部分。
正如这些临床研究向我们展示的那样,写入和读出皮层信号都提供了对神经损伤后大脑皮层重组程度的深入了解。大量研究报告了高度的重组,但直到最近,人们才很少关注仍然完好的基本结构。脑机接口研究表明,四肢瘫痪受试者可以快速使用运动皮层和 PPC 皮层来控制辅助设备,并且刺激体感皮层会在去神经支配区域产生感觉,这与完整个体预期的感觉相似。这些结果表明,即使在严重损伤后以及尽管存在损伤引起的塑性,成人皮层也具有相当大的稳定性。
未来挑战
未来的一个主要挑战是开发更好的电极,用于发送和接收神经信号。我们发现,目前的植入物可以持续工作相对较长的五年时间。但是,更好的电极理想情况下会进一步延长这些系统的寿命,并增加可以从中记录的神经元数量。另一个优先事项——增加电极微小尖峰的长度——将有助于访问位于皮层褶皱内的区域。
柔性电极会随着大脑的轻微晃动(来自血压变化或日常呼吸周期)而移动,这也将允许更稳定的记录。由于硬质电极每天相对于神经元的位置都会发生变化,因此现有电极需要重新校准解码器;研究人员最终希望在数周和数月内跟踪相同神经元的活动。
植入物需要小型化,以低功率运行(以避免大脑发热),并以无线方式运行,因此无需电缆将设备连接到脑组织。所有当前的脑机接口技术都需要通过外科手术植入。但是,我们希望有一天能够开发出记录和刺激接口,这些接口能够以侵入性更小但精度更高的方式接收和发送信号。朝着这个方向迈出的一步是我们最近在非人灵长类动物中发现的,即超声波记录的与神经活动相关的血容量变化可用于脑机接口。由于颅骨阻碍超声波,因此仍然需要一个小型的超声波透明窗口来替换一小块颅骨,但这种手术的侵入性远小于植入微电极阵列,后者需要打开硬脑膜(包围和保护大脑的坚韧层)并将电极直接插入皮层。
当然,脑机接口旨在帮助瘫痪人士。然而,科幻小说、电影和媒体都关注将这项技术用于增强,赋予“超人”能力,这可能使人反应更快(这对于许多运动任务来说当然是一个优势),或者直接从皮层发送和接收信息,很像在大脑中植入了一部小型手机。但增强功能仍然主要属于科幻小说范畴,只有当开发出能够以或接近当前微电极阵列技术精度运行的非侵入性技术时才能实现。
最后,我想表达进行基础研究并将其提供给患者的满足感。基础科学对于推进知识和开发医疗疗法都是必要的。然后能够将这些发现转化为临床环境,使研究工作最终得以实现。当科学家与患者分享他们能够移动机械肢体再次与物理世界互动时的喜悦时,科学家会感到一种不可否认的个人成就感。