对于许多海洋生物来说,再生失去的肢体是司空见惯的事情。但是,根据 6 月 15 日发表在《美国国家科学院院刊》上的一项新研究,当一只幼小的水母例如被海龟咬掉一两条触手时,它会重新排列剩余的肢体,以确保它仍然能够正常进食和游泳。作者表示,这一发现应该会让海洋爱好者和机器人工程师感到兴奋,因为水母的自我修复策略可能会教会研究人员如何制造能够自我修复的机器人。斯坦福大学的生物物理学家约翰·达比里说:“这又是一个自然界已经解决了我们工程师长期以来一直在试图解决的问题的例子。”他曾与研究人员讨论过该项目,但并未参与这项研究。
对称化的惊喜
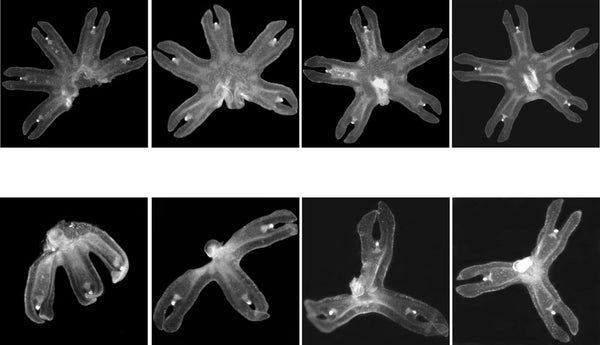
加州理工学院的博士生、该研究的主要作者迈克尔·艾布拉姆斯说,这个发现几乎是偶然发生的。艾布拉姆斯和他的导师、加州理工学院的生物学助理教授莉亚·冈托罗最初打算研究 Turritopsis dohrnii,一种枝形吊灯状的水母,它具有在生命中的任何阶段变回水螅体的能力,从而实现了生物学上的永生。但是,这些基本上未经研究的水母很难获得,因此实验室开始用另一种水母 Aurelia aurita 进行实验,同时等待“不死水母”的到来。Aurelia,也称为月亮水母,非常常见,可以通过它们伞状体上的四个新月形生殖腺轻松识别。“我开始做 150 年前的老式实验,你只是把东西切开,看看会发生什么,”艾布拉姆斯说。他选择了一些幼虫,也就是月亮水母自由游动的幼体,它们看起来像微小的星爆,每个幼虫都有八个对称的触手从圆盘状的身体中放射出来。然后,他从麻醉后的幼虫身上截断了两条触手——完全期望它的触手会重新生长,就像许多海洋无脊椎动物甚至月亮水母的水螅体阶段一样。
相反,他看到了完全不同的东西。年轻的水母没有再生被截断的触手,而是在接下来的 18 个小时内重新排列了剩余的触手,直到它们均匀分布在身体周围。通过重新创造出类似于其原始对称性的形态,该动物恢复了在海洋中生存的能力。
关于支持科学新闻
如果您喜欢这篇文章,请考虑通过订阅来支持我们屡获殊荣的新闻工作。通过购买订阅,您正在帮助确保未来能够看到更多关于当今塑造我们世界的发现和想法的具有影响力的故事。
水母触手的特定排列对于其正常游泳和进食至关重要。水母具有所谓的辐射对称,只要它可以像馅饼一样分割以产生相同的切片,它的形状可以是雪花或圆盘。水母通过拍打它们的触手来推动自己在水中移动,从而在身体中产生脉冲。在每个脉冲中,水母的身体会变形以进行推进,吸入富含营养的水,然后恢复到其最初的碟状形状以进行恢复。这些脉冲需要完美辐射对称才能使水母保持平衡。切掉一些触手,动物就会在水中螺旋和蜿蜒,并成为一个非常容易被捕食的目标。
一个简单的物理问题
这些水母通过加州理工学院团队称为“对称化”的过程将自己重新组合在一起。与再生肢体不同,这种自我修复机制既不会产生也不会破坏细胞。相反,它依赖于水母肌肉的强大力量——它比听起来更强大。
研究人员发现,缺少肢体的水母每次脉冲所施加的肌肉收缩力迫使其其他触手均匀分布。剩余触手的突然拥挤感导致水母将触手彼此推开并向空旷空间移动,从而形成更稳定的配置。“在一个脉冲中,它可能看起来会回到原来的形态,”艾布拉姆斯说。“但经过数千次脉冲,它就形成了对称。”
想象一下一辆失去前轮的马车。在不改变其余三个轮子的位置的情况下,马车会被卡住。然而,将剩余的前轮居中会重新平衡车辆,使其成为一辆功能齐全的独轮车。功能相同,身体不同。
为了确定对称化背后的驱动力,研究人员转向了肌肉本身。当研究人员向海水中添加肌肉松弛剂时,水母的肌肉收缩如预期般减慢了。截肢后,这些生物也花了更长时间才重新组织它们的附属物。相反,当研究人员减少海水中镁的含量(一种也放松肌肉的常见矿物质)时,水母的对称化速度更快。
艾布拉姆斯称,Aurelia 将其触手推入秩序的能力根植于其身体的“黏性”中。水母既柔软又有弹性,可以在短时间内像橡皮筋一样快速弹回,也可以在较长时间内像黏液一样渗出。当水母移动时,它们的组织会在这些紧张和黏性的状态之间交替。材料的流体和弹性特性的双重表达的技术术语是粘弹性。这些张力/黏性循环基本上将水母的触手彼此推开,直到它们均匀间隔。
这种愈合的捷径对于一种由明胶制成的生物来说,简直是救命稻草。《综合与比较生物学》2010 年的一项研究表明,任何时候都有 33% 到 47% 的海底无脊椎动物受伤。换句话说,变得柔软很难。
这一发现解释了水母研究领域一个长期存在的、相对较小的谜团。专门研究水母的普罗维登斯学院的生物学教授杰克·科斯特洛说,科学家们长期以来一直报告看到触手少于八条的“怪异”水母,但始终无法判断这些异常是意外、突变还是其他原因造成的。但这些“意外”可能会帮助研究人员防止另一种类型的身体——这次是人造的——发生自身的事故。
塑造软机器人领域
对称化可能会为软机器人领域的研究提供宝贵的见解,这是一个相对较新的领域,它从章鱼和蠕虫等缺乏刚性结构的“软”生物中汲取灵感。
受这种灵巧性的启发,设计师旨在在软机器人中创造更大的运动自由度。这种移动性将使软机器人能够在非结构化环境中解决精细的任务。2013 年,哈佛大学的研究人员制造了一个受海星启发的、能够通过伸展和压缩其可塑性身体来导航障碍物的运动软机器人。
然而,这种特性使得这些机器人特别容易受到尖锐物体造成的切割和穿刺。达比里认为,设计一种能够从损伤中恢复的软机器人将解决该领域面临的最大挑战之一。在《美国国家科学院院刊》的研究之前,研究人员试图通过发明一种重新生长失去的组织的方法来解决这个问题。但是,对称化可能会提供一个更好的捷径。“水母向我们展示了一种可能更简单、更优雅的解决方案:重新分配组织以在与您开始时不同的身体中保持功能,”达比里说。
对合适材料的探索(这对软机器人领域构成了另一个主要挑战)也可能从月亮水母中汲取灵感。水母身体的粘弹性使其具有出色的肌肉力量和效率。达比里说,由 95% 的水组成的水母具有“我们所知的任何动物中最高的每加仑英里数”。根据两年前发表在《美国国家科学院院刊》上的一项研究,它们黏性和弹性的脉冲使用很少的能量就能推动它们在水中移动。
2012 年,达比里和哈佛大学的生物物理学家基特·帕克生物工程制造了一种人造水母,它看起来和游泳方式都像真水母,尽管它完全是由大鼠心脏的细胞构成的。达比里说,最新的发现让他深入了解了如何将他的创造从实验室的受控环境中取出,并与现实世界的尖锐物体进行对抗。