在2015年科幻电影《超能查派》中,虚构的工程师迪昂想要创造一台可以思考和感受的机器。为此,他编写了一个可以像孩子一样学习的人工智能程序。迪昂的测试对象查派最初的精神状态相对空白。通过简单地观察和试验周围环境,他获得了通用知识、语言和复杂技能——即使是我们今天拥有的最先进的人工智能系统也无法完成这项任务。
可以肯定的是,某些机器在特定任务方面已经超越了人类的能力,例如玩《危险边缘!》、《国际象棋》和中国围棋等游戏。2017年10月,英国公司DeepMind推出了AlphaGo Zero,这是其人工智能围棋系统的最新版本。与通过挖掘大量人类对弈游戏来掌握围棋的前身AlphaGo不同,这个版本通过与自己对弈来自主积累经验。尽管AlphaGo Zero取得了非凡的成就,但它仅限于学习具有明确规则的游戏——并且需要下数百万次棋才能获得其超人般的技能。
相比之下,我们的后代从婴儿早期就开始通过探索周围环境和试验运动和语言来发展。他们自己收集数据,适应新情况,并在不同领域之间转移专业知识。
关于支持科学新闻报道
如果您喜欢这篇文章,请考虑通过以下方式支持我们屡获殊荣的新闻报道 订阅。通过购买订阅,您正在帮助确保有关塑造我们当今世界的发现和思想的具有影响力的故事的未来。
自21世纪初以来,机器人专家、神经科学家和心理学家一直在探索构建模仿这种自发性发展的机器的方法。他们的合作成果是能够移动物体、获得基本词汇和数字能力,甚至表现出社交行为的机器人。与此同时,这些人工智能系统正在帮助心理学家了解婴儿是如何学习的。
预测机器
我们的大脑不断尝试预测未来——并更新其期望以符合现实。假设您第一次遇到邻居的猫。了解您自己爱嬉戏的小狗,您期望这只猫也会喜欢您的爱抚。但是,当您伸手去抚摸这个生物时,它抓伤了您。您更新了您关于可爱动物的理论——或许推测,如果您给它带些零食,这只小猫会更友好。手里拿着好吃的东西,猫确实让您抚摸它而没有造成伤害。下次您遇到毛茸茸的猫科动物时,您会在尝试触摸它之前先给它一块金枪鱼小零食。
通过这种方式,大脑中较高Processing Center不断根据来自感觉器官的信号完善其内部模型。以我们高度复杂的视觉系统为例。眼睛中的神经细胞在将此信息传输到更高层次的区域(解释场景的整体含义)之前,先处理图像的基本特征。有趣的是,神经连接也以相反的方向运行:从高层次的Processing Center(例如顶叶或颞叶皮层的区域)到低层次的Processing Center(例如初级视觉皮层和外侧膝状核[见下图])。一些神经科学家认为,这些“向下”连接将大脑的预测传递到较低层次,从而影响我们所看到的东西。
至关重要的是,来自大脑较高层次的向下信号不断与来自感官的“向上”信号相互作用,从而产生预测误差:我们期望的和我们经历的之间的差异。传达这种差异的信号返回到较高层次,帮助完善内部模型并产生新的猜测,形成一个永无止境的循环。“预测误差信号驱动系统朝着估计真实存在的事物方向发展,”华盛顿大学的计算神经科学家拉杰什·P·N·拉奥说。
当拉奥还是罗切斯特大学的博士生时,他和他的导师,现在在德克萨斯大学奥斯汀分校的计算神经科学家达纳·H·巴拉德,成为第一个在人工神经网络中测试这种预测编码的人。(神经网络是一种模仿人脑的计算机算法,它逐步调整内部参数以从给定的输入生成所需的输出。)在这项于1999年在《自然神经科学》杂志上发表的计算实验中,研究人员模拟了视觉皮层中的神经元连接——包括携带预测的向下连接和从外部世界带来感觉信号的向上连接。在使用自然图片训练网络后,他们发现它可以学习识别图像的关键特征,例如斑马的条纹。
用手指计数
我们与许多当今人工智能系统之间的根本区别在于,我们拥有可以用来在世界各地移动和行动的身体。婴儿和幼儿通过测试他们的胳膊、腿、手指和脚趾的运动并检查触手可及的一切事物来发展。他们自主学习如何走路、说话以及识别物体和人。年轻人如何在很少指导的情况下完成所有这些事情,是发育心理学家和机器人专家研究的关键领域。他们的合作正在为这两个领域带来令人惊讶的见解。
在英国普利茅斯大学研究的机器人iCub,如果实验者在命名物体时始终将物体放置在同一位置,则可以更轻松地学习新单词,例如“球”。
孙李
在20世纪90年代后期开始的一系列开创性实验中,当时在索尼计算机科学实验室的机器人专家谷口淳等人开发了一种基于预测的神经网络,用于学习基本动作,并测试了这些算法在机器人中的工作效果。他们发现,这些机器可以获得基本技能,例如导航简单环境、模仿手部动作以及遵循基本的口头命令,如“指”和“击打”。
最近,英国普利茅斯大学的机器人专家安吉洛·坎杰洛西和印第安纳大学布卢明顿分校的发育心理学家琳达·B·史密斯证明了身体对于获取知识的重要性。“[机器人]身体的形状以及它可以做的事情的种类,会影响它拥有的经验以及它可以从中学习的内容,”史密斯说。科学家们的主要测试对象之一是iCub,这是一个由意大利理工学院的一个团队出于研究目的而制造的三英尺高的人形机器人。它没有预编程功能,允许科学家实施特定于其实验的算法。
在2015年的一项研究中,坎杰洛西、史密斯及其同事赋予iCub一个神经网络,使其能够学习简单的关联,并发现当物体的名称始终与特定的身体位置相关联时,它更容易学习新单词。实验人员反复将球或杯子放置在机器人的左侧或右侧,使其将物体与查看物体所需的运动(例如倾斜头部)联系起来。然后,他们将此动作与物品的名称配对。如果相应的物体出现在一个特定位置而不是多个位置,则机器人能够更好地学习这些基本单词。
有趣的是,当研究人员用16个月大的幼儿重复实验时,他们发现了类似的结果:将物体与特定的姿势联系起来有助于幼儿学习单词关联。坎杰洛西的实验室正在开发这项技术,以教授机器人更抽象的单词,如“这”或“那”,这些单词与特定事物无关。
使用身体还可以帮助儿童和机器人获得基本的数字技能。例如,研究表明,在心理上难以表示手指的年轻人也往往算术能力较弱。在2014年的一项研究中,坎杰洛西及其团队发现,当教机器人用手指计数时,它们的神经网络比仅使用数字名称进行教学时更准确地表示数字。
好奇心引擎
新奇事物也有助于儿童学习。在2015年发表在《科学》杂志上的一篇论文中,约翰·霍普金斯大学的研究人员报告说,当婴儿遇到未知事物时,例如一个似乎穿过墙壁的固体物体,他们会探索他们违反的期望。用朴实的语言来说,他们内置的减少预测误差的驱动力有助于他们的发展。
法国国家信息与自动化研究所INRIA的机器人专家皮埃尔-伊夫·奥德耶认为,学习过程更为复杂。他认为,孩子们积极且出人意料地成熟地寻找环境中那些提供更多学习机会的物体。例如,幼儿可能会选择玩玩具汽车而不是100片的拼图游戏——可以说是因为她的知识水平将使她能够对前者产生更多可测试的假设。
为了验证这一理论,奥德耶和他的同事赋予机器人系统一种他们称之为内在动机的功能,其中预测误差的减少会产生奖励。(对于智能机器来说,奖励可以对应于它已被编程为通过其行动最大化的数值量。)这种机制使索尼AIBO机器人(一种小型、小狗状的机器,具有基本的感觉和运动能力)能够自主寻找具有最大学习潜力的任务。机器人小狗能够获得基本技能,例如抓握物体和与另一台机器人进行口头互动,而无需被编程为实现这些特定目标。奥德耶解释说,这种结果是“机器人探索世界的副作用,其驱动力是提高其预测的动机。”
值得注意的是,即使机器人经历了相似的训练阶段,机会也在它们学习的内容中发挥了作用。有些机器人探索得少一些,有些机器人探索得多一些——最终它们了解了不同的事物。奥德耶认为,这些不同的结果表明,即使具有相同的编程和相似的教育环境,机器人也可能获得不同的技能水平——这很像典型的课堂中发生的情况。
最近,奥德耶的研究小组使用计算模拟表明,配备这些预测算法(和适当硬件)的机器人声带也可以学习语言的基本要素。他现在正在与哥伦比亚大学的认知神经科学家杰奎琳·戈特利布合作,以调查这种预测驱动的内在动机是否也是人类好奇心神经生物学的基础。他说,进一步探索这些模型可能有助于心理学家了解发育障碍和疾病儿童的大脑中发生了什么。
利他主义机器人
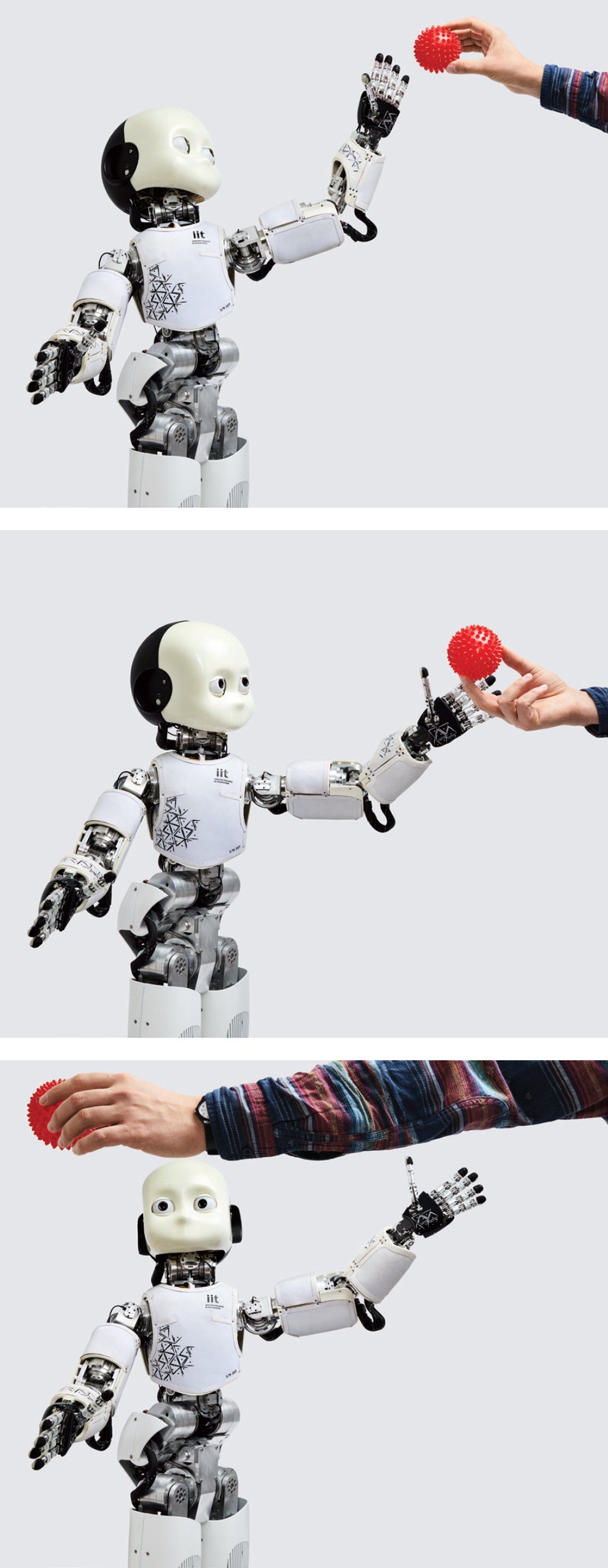
研究人员发现,即使iCub没有被编程为具有内在的社交能力,仅减少预测误差的动机就足以使其表现出乐于助人的行为。例如,在教机器人推动玩具卡车后,它可能会观察到实验人员未能完成相同的动作。通常,它会将物体移动到正确的位置——只是为了增加卡车在给定位置的确定性。目前在日本国家信息通信技术研究所的永井认为,幼儿可能会以类似的方式发展。“婴儿不需要有帮助他人的意愿,”她认为:仅最小化预测误差的动机就可以启动基本的社交能力。

图片来源:Mesa Schumacher(大脑)和Amanda Montañez(级联图)
预测处理也可能帮助科学家理解自闭症等发育障碍。根据永井的说法,某些自闭症患者可能对预测误差更敏感,这使得传入的感觉信息不堪重负。这可以解释他们对重复行为的吸引力,重复行为的结果是高度可预测的。
荷兰拉德堡大学的认知心理学家哈罗德·贝克林认为,预测处理也可能有助于解释注意力缺陷多动障碍患者的行为。根据这一理论,自闭症患者更喜欢保护自己免受未知事物的侵害,而那些难以集中注意力的人则永远会被周围环境中不可预测的刺激所吸引,贝克林解释说。“有些人对世界敏感,探索世界,而另一些人对世界过于敏感,则会保护自己,”他建议。“在预测编码框架中,您可以很好地模拟这两种模式。”他的实验室目前正在使用人类脑成像来检验这一假设。
永井希望通过进行“认知镜像”研究来评估这一理论,在研究中,配备预测学习算法的机器人将与人互动。当机器人和人使用肢体语言和面部表情进行交流时,机器将调整其行为以匹配其伙伴——从而反映出人对可预测性的偏好。通过这种方式,实验人员可以使用机器人来模拟人类认知——然后检查其神经结构,以试图破译人类头部内部正在发生的事情。“我们可以将我们的特征外化到机器人中,以更好地了解我们自己,”永井说。
未来的机器人
对机器人儿童的研究因此帮助回答了心理学中的某些关键问题,包括预测处理的重要性以及身体在认知发展中的作用。“我们已经了解了大量关于复杂系统如何工作、身体的重要性以及[和]关于探索和预测等真正基本的事物,”史密斯说。
然而,能够发展出类似人类智能的机器人还远未成为现实:查派仍然属于科幻小说的范畴。首先,科学家需要克服技术障碍,例如大多数机器人的脆弱身体和有限的感觉能力。(软机器人和机器人视觉等领域的进步可能有助于实现这一目标。)更具挑战性的是大脑本身令人难以置信的复杂性。尽管在许多方面都在努力模拟大脑,但科学家们离制造出可以与大脑匹敌的机器还很远。“我完全不同意那些说在10或20年内我们将拥有具有人类水平智能的机器的人,”奥德耶说。“我认为这表明对人类智能的复杂性存在深刻的误解。”
此外,智能不仅仅需要合适的机器和电路。大量的研究表明,照顾者对儿童的发展至关重要。“如果你问我机器人是否可以变得真正像人类,那么我会问你是否有人可以像照顾孩子一样照顾机器人,”谷口说。“如果有可能,那么是的,我们也许能够做到这一点,否则,期望机器人像真正的人类孩子一样发展是不可能的。”
逐步积累知识的过程也可能是必不可少的。“发展是一个非常复杂的级联系统,”史密斯说。“今天发生的事情为[明天]奠定了基础。”因此,她认为,如果不以某种方式整合贯穿一生的逐步学习过程,就可能无法构建人类水平的人工智能。
理查德·费曼在去世前不久写道:“我无法创造的东西,我不理解。”在谷口2016年的著作《探索机器人思维》中,他将他的概念颠倒过来,说:“我可以理解我能创造的东西。”他认为,理解人类思维的最佳方法是合成一个思维。
有一天,人类可能会成功创造出一个可以像孩子一样探索、适应和发展的机器人,也许还配备了代理照顾者,以提供健康成长所需的爱和指导。与此同时,类儿童机器人将继续为我们提供关于儿童如何学习的宝贵见解——并揭示当基本机制出错时可能会发生什么。