大多数机器人由人类工程师设计,他们必须费力地安排每个关节和人造肌肉,以使机器人完成特定任务。这个过程缓慢且受人类想象力的限制;佛蒙特大学的计算机科学家乔什·邦加德说,让算法来做这件事可以“帮助开创定制机器人世界”。在一项新的研究中,他和他的同事使用基于反馈的算法来设计各种blob状步行机器人,速度创下了纪录。结果最近发表在美国国家科学院院刊上。
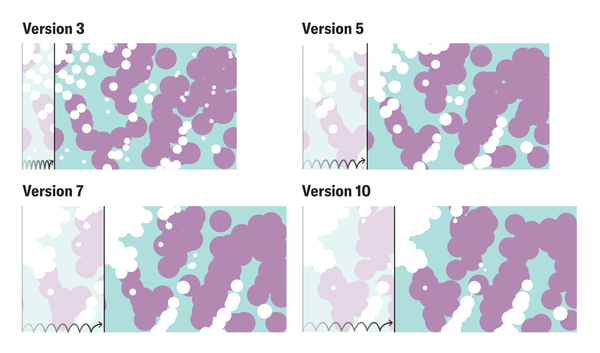
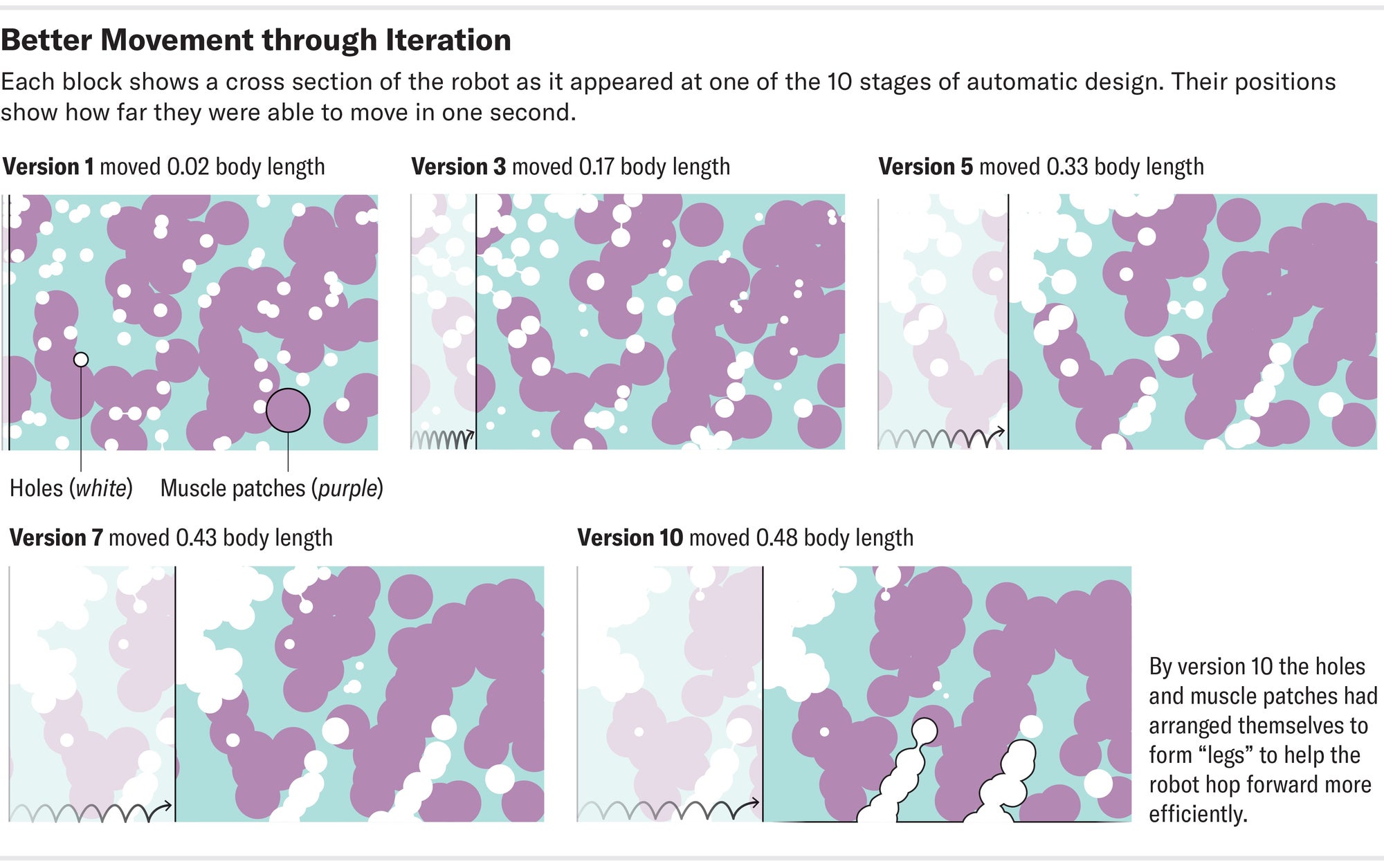
每个机器人最初都是一块数字模拟的凝胶状物质砖块,其中随机散布着 64 个孔,就像一块瑞士奶酪。它还包含 64 个随机放置的人造肌肉贴片,当弯曲时,会导致其身体附近的部位伸展和收缩。起初,模拟砖块只是在原地跳跃。但随着算法调整肌肉的位置,以及孔的位置和大小,砖块开始向前跳跃。九个版本之后,孔已经合并,雕刻出了一些粗短的“腿”,这些“腿”已经布满了肌肉。由此产生的数字机器人每秒可以移动半个身长的距离——而整个设计过程,团队重复了 100 次,在笔记本电脑上仅用了 30 秒。
新加坡国立大学的机械工程师塞西莉亚·拉斯基说:“最大的贡献是他们以非常短的时间,通过非常有限的迭代次数实现了这一切。”她研究软体机器人,但没有参与这项新研究。
支持科学新闻报道
如果您喜欢这篇文章,请考虑通过以下方式支持我们屡获殊荣的新闻报道 订阅。通过购买订阅,您正在帮助确保有关塑造我们今天世界的发现和想法的有影响力的故事的未来。
研究人员用硅酮浇铸了其中一种设计,制作了一个大约半块肥皂大小的物理生物。对于肌肉,科学家们贴上了微小的气囊,可以通过泵入脉冲空气来弯曲。该机器人的行走速度比模拟慢——每分钟半个身长——但明显快于随机设计。
这些最大化运动的调整是由一种称为梯度下降的优化算法引导的。这项技术为大多数机器学习算法提供动力,可以找到变量数量庞大的问题的最佳解决方案。在本例中,这些变量是肌肉位置,以及孔的位置和大小。该算法反复策略性地修改它们,使系统在每次迭代中都得到改进。
该团队使用了相同的技术来设计具有其他目标的虚拟机器人,例如运输或发射物体。接下来,他们希望创造更复杂的机器,利用传感器与世界互动。
致谢:阿曼达·蒙塔涅斯;来源:David Matthews 等人的“机器人高效自动设计”,刊登于美国国家科学院院刊,第 120 卷;2023 年 10 月 3 日