关键概念
工程学
机器人
解剖学
抓握
引言
人的手非常神奇。你可以做一些事情,比如拿起一支铅笔,使用游戏控制器或爬上攀爬架,而无需过多考虑。制作一个能做所有这些事情的人工手是一个相当大的挑战!在这个项目中,你将尝试制作一个可以拿起小物件的简单人工抓取器。
背景
人的手有五个手指,每个手指都有多个关节。这些关节由肌肉和肌腱控制——肌肉拉动肌腱,肌腱拉动关节,使它们弯曲。人的手有很多不同的关节,这使得它非常灵活和多功能,并且很容易适应各种不同的任务。你从小就学会使用你的手,当你长大后,你几乎不必考虑它了!
关于支持科学新闻
如果您喜欢这篇文章,请考虑通过以下方式支持我们屡获殊荣的新闻工作 订阅。通过购买订阅,您正在帮助确保关于塑造我们今天世界的发现和想法的具有影响力的故事的未来。
多年来,工程师们一直试图制造机器人手,但事实证明,这非常困难。我们在制造擅长特定事情的机器人手方面做得相当不错。例如,工厂中的机器人抓取器可能被设计用来拿起某个零件并将其螺栓固定到汽车上。但是,如果你试图让那个抓取器拿起网球或一杯水,它就完全不起作用了!制造一个像人手一样多功能的机械手仍然是一个巨大的挑战。
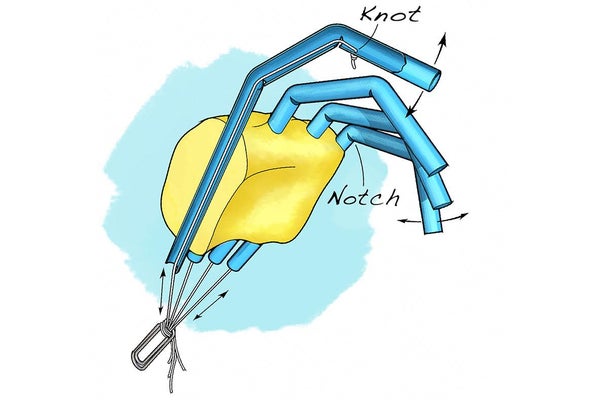
在这个项目中,你将使用吸管和绳子制作一个简单的人工抓取器。你将在吸管上切出凹口,这些凹口将作为“关节”,并将绳子穿过吸管,作为“肌腱”。拉动绳子将导致关节弯曲。你可以尝试制作不同类型的抓取器,例如一个简单的爪状抓取器,它只有两个手指,每个手指只有一个关节,或者一个具有多个关节单独控制的完整的人形手。
材料
塑料吸管
针(处理尖锐物体时请小心并寻求成人帮助。)
绳子
回形针
橡皮泥
各种要拿起的小物件
剪刀
镊子(可选)
小橡皮筋(可选)
纸巾筒(可选)
准备工作
将所有材料组装在一个平坦的工作空间上,该空间有足够的区域来制作和测试你的作品。
步骤
首先,你将练习制作单个“手指”。使用剪刀(必要时请寻求成人协助)在吸管中间小心地切出一个小的三角形凹口。确保不要完全切穿吸管。这应该允许你在这个点“弯曲”吸管,但是当你松开时,吸管应该弹回其原始形状。这个凹口是你手指的“关节”。
将绳子的一端穿过针眼系好。
小心地用针刺穿吸管,就在你切出的凹口上方。确保你在切出凹口的一侧刺穿吸管,而不是在“背面”。
将针头一直推入吸管,穿过你切出的凹口,然后从吸管底部穿出。使用镊子伸入吸管(通过凹口或从底部)抓住针头并将其拉出可能会有所帮助。你也可以垂直握住吸管并摇晃它,让针头掉下来。
继续拉动针头,直到大约 10 厘米的绳子从吸管底部伸出。这条绳子将像“肌腱”一样帮助手指弯曲。
剪断绳子的另一端,留出足够的余量,以便你可以打结。确保结足够大,不会被拉过你用针刺穿的孔。
解开或剪断针眼上的绳子。
将绳子的底端系在回形针上。
你刚刚完成了你的第一个“手指”。用一只手握住吸管的底部。用另一只手拉动回形针。这应该会导致吸管在凹口处弯曲,类似于手指在关节处弯曲。仅用这一根手指你能拿起什么?拥有更多手指会有什么帮助?
现在是时候制作更多手指了!重复以上步骤至少再制作一个手指。你还可以决定每个手指是具有多个关节还是只有一个关节。如果一个手指确实有多个关节,你可以使用一根绳子来控制所有关节(通过在最后一个关节上方将其系紧),或者使用单独的绳子来控制每个关节(通过在每个关节上方的吸管中穿入多根绳子)。
尝试制作不同类型的手指并通过拉动绳子来控制它们。
现在是时候将一些手指连接成一个抓取器了!你设计和制作的手的类型完全取决于你。请记住,你不必设计一个有五个手指的人手。例如,你可以制作一个带有两个钳子的爪子(像螃蟹或龙虾),或者一个带有三个或四个对称手指的爪子(像在拱廊机器中捡起毛绒玩具的那种)。
尝试组合多个手指。通过在吸管底部周围形成橡皮泥,来形成你手的底部或“手掌”。确保你不要盖住吸管的底部开口,以便你仍然可以拉动绳子。调整橡皮泥可以让你改变手指相对于彼此的位置和方向。
根据你拥有的橡皮泥类型,你可能需要让它风干并变硬,以便你的手能更好地工作。(当橡皮泥仍然很软时,可能很难使用手。有些类型的橡皮泥可能一开始就足够硬,可以立即工作。)
当手指安装在手掌上后,尝试拉动绳子来控制手指。你可能需要进行一些调整才能使一切正常工作。你认为你可以进行哪些更改来提高你手的性能?
现在尝试用你的手拿起一些小物件。请记住,你的手是用吸管制成的,所以不是很结实,因此你只能用它来拿起轻巧的物体(例如,空塑料瓶,而不是装满液体的塑料瓶)。
你的手是否更擅长拿起某些物体而不是其他物体?你能否设计一种专门用来抓取某些物体的手?例如,一种类型的手用来拿起圆柱形物体,如瓶子,另一种类型用来抓取球形物体,如网球?你认为设计一个像人手那样适应性强的东西会很困难吗?人手可以轻松地拿起形状非常不同的东西?
额外:将你的机械手的手掌安装在纸板纸巾筒的末端,并将绳子穿过筒子。现在你就有了一个可以伸长的抓取器,你可以用它来拿起东西!
额外:塑料吸管可能有点滑,因此请尝试提高你的机械手的“抓握力”。例如,在吸管周围缠绕小橡皮筋。提高吸管的“抓握力”是否更容易拿起东西?
观察和结果
你应该能够制造一个可以拿起轻物的人工手,例如乒乓球、空塑料瓶或小型毛绒玩具。用吸管和橡皮泥制造一个可以抓住较重物体的手会很困难。如果你想制造一个更结实的手,你可以用五金店更坚固的材料来替换吸管和橡皮泥(例如,用塑料管道代替手指,用金属缆线代替肌腱,用在掌心钻孔的木制底座)。
制造和控制所有手指和关节都由一根绳子控制的手要容易得多(类似于“拱廊机器”式的爪子,所有手指同时打开和关闭)。制造一个具有多个单独控制关节的铰接手要困难得多——但这不应阻止你尝试!请记住,你自己的手非常复杂,即使是专业工程师,至今仍在努力制造一个完全功能且等同于人手的机器人手。
因为这是一个工程设计活动,所以没有特定的公式可以遵循来制造你的手。设计可能非常不同,并且没有“正确”或“错误”的制作方法。你可能会发现某些设计更适合执行不同的功能。如果你用不同数量的手指制造了不同的手,你发现哪一个是最通用的?
更多探索 用吸管抓取:使用吸管制作机器人手,来自科学伙伴
你美妙的手,来自儿童健康
适合所有年龄段的科学活动,来自科学伙伴
此活动由科学伙伴合作提供
