
在过去的十年中,光学研究人员已经证明,无需镜子即可看到视线之外的物体。然而,这项成功需要使用发射持续时间不到万亿分之一秒的脉冲的特殊激光器,以及能够检测单个光子的高性能传感器。现在,波士顿大学的一个团队已经表明,一个算法和一个普通的数码相机也可以在没有镜子的情况下观察角落——而且不需要如此昂贵和复杂的设备。
潜望镜和镜子可以很容易地查看拐角处的情况,但它们提供的清晰度是有风险的。镜子和潜望镜必须放置在它们所观察物体的视线中,在那里它们很容易被发现和摧毁。秘密观察者更喜欢通过从非显而易见的来源(例如从涂漆墙壁的哑光表面反射的光)提取信息来在视线之外操作。
光线以相同的角度从银色金属表面(如镜子)反射,就像它们是从原子尺度上完全平坦的表面上弹起的微小球体一样。哑光表面(如涂漆的墙壁和白色海报板)在人眼看来很光滑,但在原子尺度上很粗糙,因此它们以各种角度散射光,而不是以统一的方向散射。因此,哑光表面会扰乱来自不同方向的光线,使我们的眼睛无法识别它来自哪里。
关于支持科学新闻报道
如果您喜欢这篇文章,请考虑通过以下方式支持我们屡获殊荣的新闻报道 订阅。通过购买订阅,您将有助于确保关于塑造当今世界的发现和想法的有影响力的故事的未来。
2009 年,麻省理工学院媒体实验室相机文化研究小组负责人 Ramesh Raskar 和他的同事们计时了 направленную 在激光照射到看不见的区域之后,从激光到达物体并返回的时间。从那时起,Raskar 的小组和其他人大大增强了这些“飞行时间”观测,就像微波和光学雷达脉冲一样,通过计算光从目标往返的传播时间来测量距离。
为了寻求更简单的方法,电气和计算机工程师 Vivek Goyal 和他在波士顿大学的同事通过考虑光线为在表面之间沿直线传播的光线来分析查看角落的问题,这种方法用于光学设计。他们追踪光线从墙一侧的物体发出,绕过一个拐角,然后从哑光表面反射并进入墙另一侧的相机的路径。在简单的排列中,相机只能看到哑光表面,因为它均匀地散射光线。
然而,他们发现,在隐藏的物体(一个显示图像的照明屏幕)和哑光表面之间放置一个平坦的不透明“遮挡物”会改变画面。遮挡物会投下阴影,阻止显示屏的部分光线到达哑光表面的部分区域。这种效果类似于月偏食,地球阻止阳光照射到月球的部分区域。
通过追踪来自阴影边缘的光线,Goyal 的团队可以绘制出屏幕的哪些部分会照亮哑光表面的哪些部分。然后,他们创建了算法,这些算法可以从数码相机记录的哑光表面图像中反向工作,以重新创建屏幕上显示的图案。
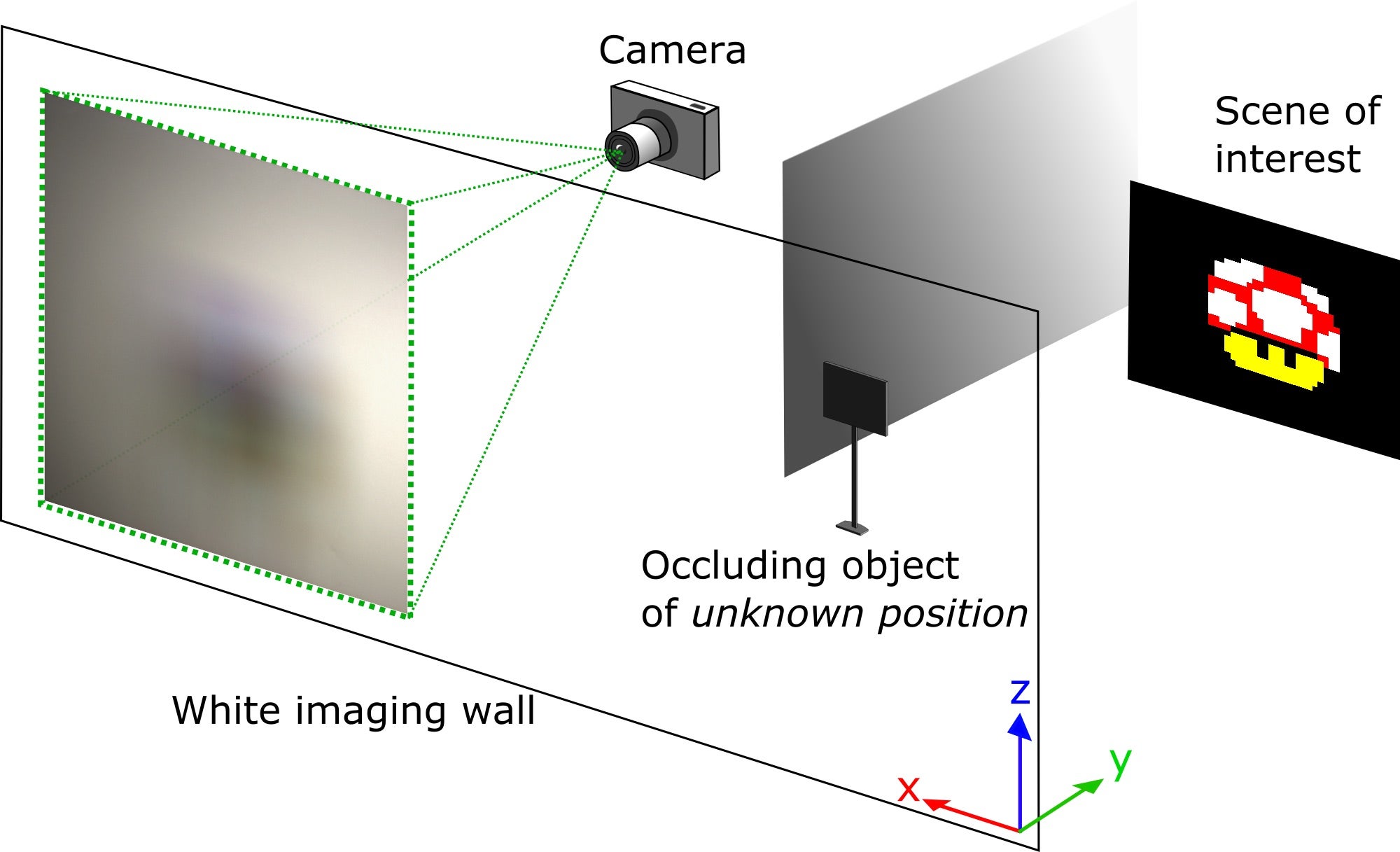
实验是在液晶显示器显示感兴趣的场景时进行的。来自该图像的光线照射到一个固体的遮挡物体背面,该物体阻挡了一些光线,但让其余的光线像半影一样绕过它,照亮一个带有哑光表面的成像墙。投射到墙壁上的光线与原始场景不相似。但是,数码相机捕获了投影,然后计算机算法成功地处理了投影,以重建感兴趣的场景。 图片来源:Charles Saunders 《自然》
Goyal 说:“场景中有一个不透明的遮挡物……使之能够工作。”为了验证他们的想法,他们建立了一个桌面模型,其中一个四百万像素的数码相机面对一个内部墙壁一侧的哑光表面,该表面带有遮挡物,另一侧则是一个数字显示器。Goyal 的小组在 1 月 24 日的《自然》杂志上撰文说,通过他们的算法运行哑光表面的相机图像,可以重现屏幕上显示的图像。他们“计算潜望镜”的图像远非完美。但是 Goyal 说:“我们从没想过它会如此有效,”他补充说,“从概念上讲,这可能是智能手机中的一个应用程序。”他说,尽管原理简单且适用范围广泛,“编写这样的手机应用程序将非常重要”,因为它必须适应其使用的环境。
Raskar 没有留下深刻的印象。他称这种演示“类似于在超快飞行时间系统方面的同步工作”,并说计算系统在使用前需要估计遮挡物的形状和位置,“在诸如秘密观察之类的现实场景中可能具有挑战性”。
然而,未参与这项研究的法国-德国研究所的光学工程师 Martin Laurenzis 则乐观得多。他说:“基本原理非常聪明,”他指出,针孔相机通过阻挡大部分光线来创建图像,但 Goyal 的系统仅阻挡少量光线。Laurenzis 说:“这两种方法都旨在揭示角落周围的场景,并扩展光学传感器的感知范围,”但他认为这两种方法的目的是“完全不同的应用”。Goyal 说,他从未系统地比较这两种方法,因为“它们在所做的事情和所取得的成就方面看起来如此‘苹果和橘子’”,他认为将这两种技术结合起来可能会产生令人兴奋的结果,并且他正在全力以赴地追求它。
国防高级研究计划局 (DARPA) 正在支持 大部分研究,希望开发新型的光学信息收集。但是,该领域仍然很年轻。Laurenzis 说:“即使在非视线飞行时间成像十年之后,我们仍处于起步阶段。”